軟考系統架構設計師案例分析例題+答案詳解!

案例場景
隨著機器人、智前化技術的快速發展,機器人操作系統(Robot Operating System,ROS)被廣泛應用。某公司長期從事機器人產品研制工作,隨著人工智能技術的成熱,公司產品智能化改造得到公司領導層的高度重視。張工為公司提供了一份產品升級改造方案。
問題內容:
[問題1] (12 分)
在改造方案中,張工提到:關于軟件平臺的選型,鑒于公司長期使用開源 ROS 框架作為產品的軟件平臺,這次升級仍然需要保持開發人員習慣,使用ROS1 的升級版 ROS2 支持智能化的需求。而王工提出不同意見,指出前期使用段 ROS1時,已存在了眾多不滿足產品研制的問題,比如Master中心節點管理不合理、通信效率低等問題。張工逐一解釋了ROS2 主要改進點。
(1)請概要說明 ROS 定義和特點。
(2)請說明 ROS2 相對 ROS1主要在哪些方面做了改進?
[問題2] (5分)
圖1給出了 ROS2的軟件架構,請簡要說明 ROS2 軟件架構各層的主要功能。
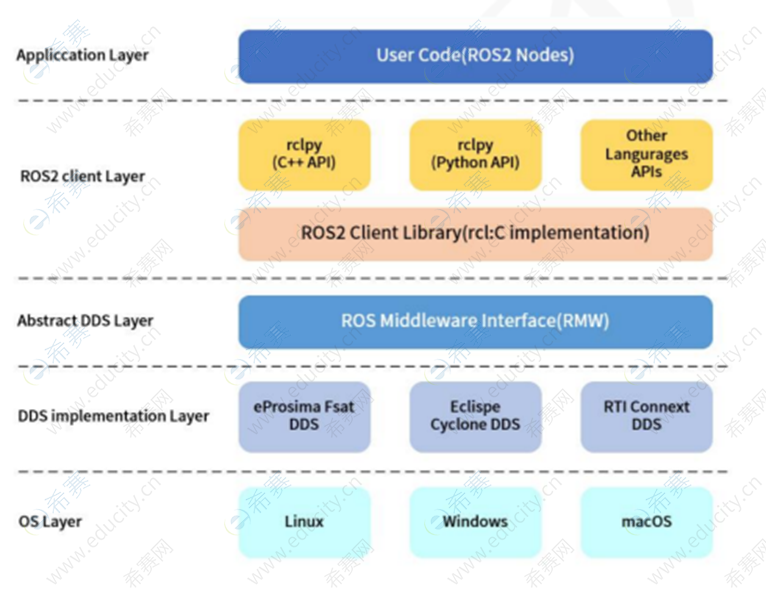
圖1 ROS2 軟件架構
[問題3](8分)
ROS2 提供了四種通信模型,即:話題(topic)通信、服務通信、動作通信和參數服務(見圖2)。分析下列對四種通信模型的功能描述,請說明(1)~(4)的功能描述分別屬于哪種通信模型?
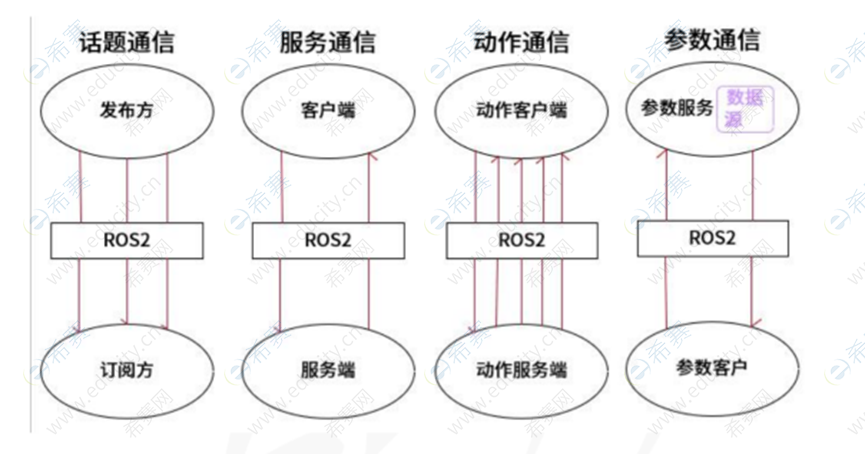
圖2 ROS2常用的四種通信模型
(1) 是一種基于共享的通信模型,在通信雙方中,服務端可以設置數據,而客戶端可以連接服務端并操作服務端數據。
(2)是一種單向通信模型,在通信雙方中,發布方發布數據,訂閱方訂閱數據,數據流單方向的由發布方傳輸到訂閱方。
(3)是一種帶有連續反饋的通信模型,在通信雙方中,客戶端發送請求數據到服務端,服務端響應結果給客戶端,但是在服務端接收到請求到產生最終響應的過程中,會發送中間連續的反饋(進度)信息到客戶端。
(4)是一種基于請求響應的通信模型,在通信雙方中,客戶端發送請求數據到服務端,服務端響應結果給客戶端。
試題答案:
[問題1]
(1)
ROS 的定義和特點:
定義:是一個專為機器人軟件開發設計的開源的元級操作系統。它提供類似于傳統操作系統的功能,如硬件抽象、底層設備控制、進程間消息傳遞和程序包管理等,并包含一系列工具和庫,支持多語言編程,用于實現多機融合的程序開發和執行。
ROS 的特點主要包括:采用分布式架構實現模塊化和可擴展性;支持多種編程語言以滿足不同開發需求;提供豐富的工具集提高開發效率;擁有龐大的開源社區支持,促進共享和發展等。
(2)
ROS2 相對于 ROS1主要在以下幾個方面進行了改進:通信機制上,ROS2采用了 DDS,實現了去中心化的發布/訂閱模型,提高了系統可靠性;支持平臺上,ROS2擴展到了多個操作系統,提供了更廣闊的開發空間;實時性上,ROS2進行了優化,顯著提升了實時性能;安全性上,ROS2加強了安全措施,提高了網絡通信中的安全性;數據類型和序列化上,ROS2 使用了 DDS 的數據類型系統,支持更復雜的數據結構和數據類型;節點組織上,ROS2 允許節點獨立運行或共享進程,提高了效率。
[問題2]
ROS2 的軟件架構各層主要功能如下:
Aapplication Layer:提供基于 ROS2的應用程序和服務,利用ROS2的中間件功能實現特定的機器人功能或任務。
ROS2 Client Layer:提供 ROS2 的核心功能和API,包括節點管理、消息通信、服務調用等,是應用程序與底層通信機制之間的橋梁。
Abstract DDS Layer:為ROS2 提供與數據分發服務(DDS)無關的抽象接口,屏蔽
DDS 實現的細節,提高系統的靈活性和可擴展性。
DDS Implementation Layer:提供具體的 DDS 實現,負責數據的發布、訂閱和服務調用等通信操作,是實現ROS2 通信機制的關鍵部分。
OS Layer: 為 ROS2 提供底層的操作系統支持,包括進程管理、內存管理、網絡通信等,是 ROS2 運行的基礎。
[問題3]
(1)參數服務
(2)話題通信
(3)動作通信
(4)服務通信
延伸閱讀

軟考備考資料免費領取
去領取
- 0
- 3
- 6







 掃描二維碼
掃描二維碼
 掃描二維碼
掃描二維碼








